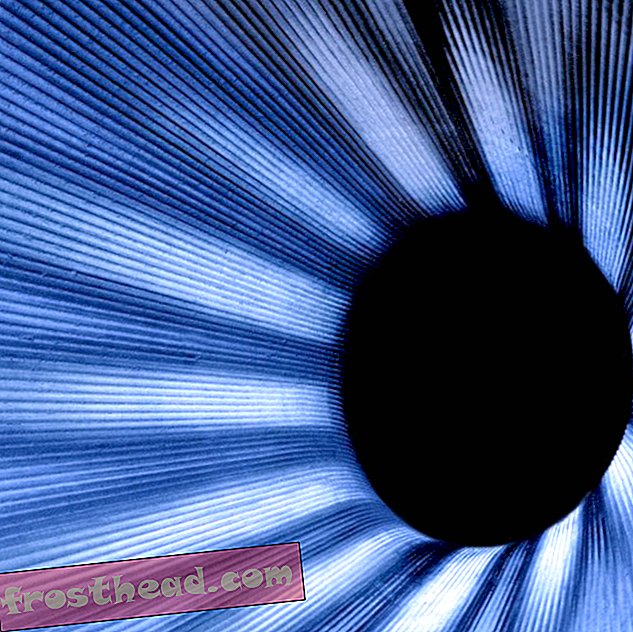
Uusi robotti kulkee epätasaisen pinnan yli siten, että se on mallina seeprapäättyvälle lisalle. Kuva: Chen Li, Tingnan Zhang, Daniel Goldman
Robotin suunnittelu, joka voi helposti liikkua löysän maaston yli - toisin sanoen Roverin, joka on tarkoitettu kulkemaan Marsin pinnan läpi - on ainutlaatuinen tekniikan haaste: Pyörät uppoavat yleensä siihen, mitä insinöörit kutsuvat ”virtaamaan maaksi” (hiekan, maaperän, mutaa ja ruohoa sisältävät seokset) ).
Ottaen huomioon monet biologisesti innoittamat robottiinnovaatiot, Georgia Techin tutkijaryhmällä oli idea - perustaa malli autiomaisille olentoille, kuten seeprapäätyisille liskoille, jotka pystyvät leviämään löysän, hiekkaisen pinnan yli hidastamatta. Heidän ponnistelujensa ansiosta he pystyivät luomaan tämän pienen kuudenjalkaisen laitteen, joka esiteltiin tänään Science- julkaisussa julkaistussa artikkelissa ja joka voi kulkea rakeisen pinnan läpi tavalla, joka muistuttaa tylsästi matelijaa.
Tutkimusryhmä, jota johtaa John Li, suunnitteli laitteen tutkittuaan eri olentojen liikkumisen ja matemaattisesti simuloimalla erityyppisten jalkojen (lukumääräisesti, muodoltaan ja pituudeltaan vaihtelevia) suorituskykyä useissa erillisissä ympäristöissä. He toivovat tutkimuksensa kannustavan kentän kehittämiseen, jota he ovat nimittäneet "terradynaamiseksi" - koska aerodynamiikka koskee siivekkien ajoneuvojen suorituskykyä ilmassa, heidän kentänsä tutkii jaloitettujen ajoneuvojen liikettä rakeisilla pinnoilla.
Suunnitellessaan robottinsa he käyttivät näitä simulaatioita määrittämään tarkat jalkojen pituudet, liikkeenopeudet ja voimatasot, jotka ajavat laitteita löysän pinnan yli aiheuttamatta niiden uppoaa liian syvälle. Sitten he tulostavat erilaisia jalkatyyppejä 3D-tulostimella ja rakensivat robotteja testaamaan niitä laboratoriossa.
Yksi mielenkiintoisimmista havainnoista on, että samantyyppisiä suunnitteluperiaatteita sovelletaan liikkumiseen monilla rakeisilla pinnoilla, mukaan lukien unikonsiemenet, lasihelmet ja luonnollinen hiekka. Niiden simulaatiot ja reaalimaailman kokeet paljastivat, että C-muotoiset jalat toimivat yleensä parhaiten, mutta minkä tyyppiset jousimuotoiset raajat toimivat suhteellisen hyvin, koska ne jakavat laitteen painon pitkille (vaikkakin kapeille) jalkapinnoille, kun jalat tulevat kosketuksissa maan kanssa askeleen aikana.

Tutkijat havaitsivat, että C-muotoiset raajat toimivat parhaiten nopeasti liikkuviksi rakeisilla pinnoilla, niin liskoissa kuin robotissa. Katkoviivat, kiinteät ja pisteviivat kuvat C: ssä ja D: ssä ovat varhaisen, keskimmäisen ja myöhäisen jalan asemat askeleen aikana. Nuolet osoittavat liikesuuntia tietyille jalka-alueille. Kuva Science / Li et. ai.
Tämän tyyppisen tutkimuksen sovellukset ovat laajoja: Tutkijoiden mukaan tätä tiettyä robottia voitaisiin kehittää hyödylliseksi etsintä- ja pelastus- tai partiolaitteeksi, kun taas terradynamiikan alueelta johdetut periaatteet voisivat olla hyödyllisiä suunniteltaessa koettimia tutkimaan muita planeettoja tulevaisuudessa. He voisivat myös auttaa biologia ymmärtämään paremmin, kuinka elämänmuodot täällä maan päällä ovat kehittyneet siirtyäkseen planeettamme pinnan yli.