Ihmisille - etenkin valmistuksessa työskenteleville - on melko yleistä sitoa solmu, irrottaa kotelo kaapelista, asettaa tappi reikään tai käyttää käsityökalua, kuten poraa. Ne saattavat tuntua yksinkertaisilta tehtäviltä, mutta ovat todella hyvin monimutkaisia ja käsittävät erittäin hienot sormen- ja kädenliikkeet.
Asiaan liittyvä sisältö
- Kuinka robotit jättivät laboratorion ja auttoivat ihmisiä
Vaikka robotit osallistuvat yhä enemmän tehdastyöhön ja monenlaisiin muun tyyppisiin töihin - mukaan lukien palveluteollisuus ja terveydenhuolto -, niiden osaaminen ei ole läheskään yhtä vaikuttavaa. Siitä lähtien kun ihmiset toivat heidät ensimmäistä kertaa autotehtaisiin työskentelemään yli 50 vuotta sitten, olemme rakentaneet robotteja, jotka voivat hitsata, maalata ja koota osia melko hyvin. Tämän päivän parhaat robottikädet voivat poimia tuttuja esineitä ja siirtää niitä muihin paikkoihin - esimerkiksi ottamalla tuotteita varastosäiliöistä ja laittamalla laatikoihin.
Mutta robotit eivät voi suunnata käsityökalua oikein - sanoa esimerkiksi vuorata Phillips-pään ruuvitaltta ruuvin urilla tai kohdistaa vasara naulaan. Ja he eivät todellakaan voi käyttää kahta kättä yhdessä yksityiskohtaisesti, kuten paristojen vaihtamiseksi kaukosäätimeen.
Ihmisen kädet ovat erinomaisia näissä tehtävissä ja paljon muuta. Robottikädet tarvitsevat paremman ketteryyden, luotettavuuden ja lujuuden jopa kilpaillakseen siihen, mihin kätemme helposti kykenevät - ja heidän on kyettävä tunnistamaan tarkemmin ja liikkumaan vieläkin hienommin kuin nyt, selvittääkseen mitä he " pidät ja miten tarttua siihen parhaiten. Jotta robotit pystyisivät toimimaan ihmisten rinnalla, meidän on selvitettävä, kuinka tehdä robotteja, jotka voivat kirjaimellisesti antaa meille käden, kun omat kaksi eivät riitä.
Koillis-yliopiston tutkimusryhmäni työskentelee juuri tämän tekemisessä, etenkin NASA: n Valkyrien kaltaisten humanoidirobotien kanssa, joilla on kolme sormea ja peukalo molemmissa käsissä. Jokaisessa numerossa on nastan muotoiset liitokset ja jokaisessa kädessä on ranne, joka voi pyöriä helposti. Pyrimme luomaan liikkeitä - käsivarren, ranteen, sormen ja peukalon liikkeiden yhdistelmiä, jotka suorittavat yhdessä tehtävän, kuten liikuttamalla jakoavainta ympyrässä pultin kiristämiseksi tai vetämällä kärryä paikasta toiseen.
 Jokaisella näistä teollisuusroboteista on useita erikoistyökaluja. Voisiko monet heidän tehtävänsä suorittaa robotti käsillä? (Steve Jurvetson / flickr, CC BY)
Jokaisella näistä teollisuusroboteista on useita erikoistyökaluja. Voisiko monet heidän tehtävänsä suorittaa robotti käsillä? (Steve Jurvetson / flickr, CC BY) Käsien merkitys
Sen sijaan, että tehdään jokaisesta robotista räätälöity kone, joka on räätälöity hyvin tiettyyn tehtävään, meidän on suunniteltava monikäyttörobotit tai jopa sellaiset kykyiset koneet, joita voidaan kutsua ”yleiskäyttöön” - hyviä melkein mihin tahansa tehtävään. Yksi avain tällaisten robotien menestykseen on erinomaiset kädet.
Työmme keskittyy uuden luokan mukautuviin robotti käsiin, jotka kykenevät tarkkoihin hienoihin liikkeisiin ja itsenäiseen tarttumiseen. Kun robotit kykenevät vasaramaan nauloissa, vaihtamaan paristot ja tekemään muita samankaltaisia liikkeitä - ihmisille perustavanlaatuisia, mutta erittäin monimutkaisia robotille -, olemme hyvällä matkalla robotin käsissä olevaan ihmisen kaltaiseen taitoon.
Tämän tavoitteen saavuttaminen edellyttää myös uusien kuvioiden keksimistä, joissa on kovia ja pehmeitä elementtejä - tapa, jolla ihmisen luu antaa lujuudelle otteen, ihon levittämällä painetta, jotta viinilasi ei särky.
Nopeampi kehitys ja testaus
Nykyaikaiset teknologiset parannukset tekevät kehitysprosessista helpompaa. 3D-tulostuksella voimme tehdä prototyyppejä erittäin nopeasti. Voimme jopa tehdä halpoja kertakäyttöisiä komponentteja kokeilla erilaisia järjestelyjä mekanismeista, kuten kahden tai kolmen sormen tarttujat yksinkertaisiin valintapaikoille tai antropomorfiset robotin kädet herkempiin toimintoihin.
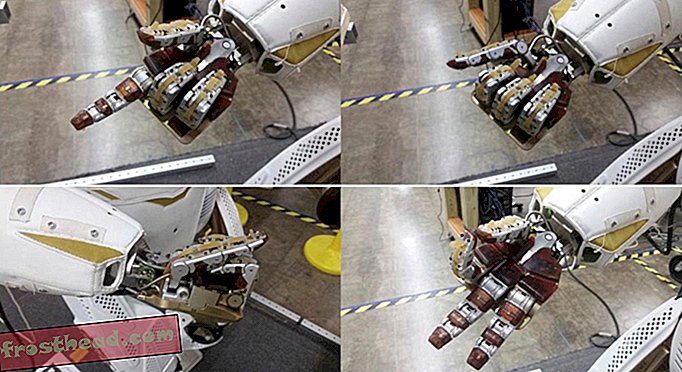 Erityyppiset kädet NASA Valkyrie -robotissa. (Koillisyliopisto, CC BY-ND)
Erityyppiset kädet NASA Valkyrie -robotissa. (Koillisyliopisto, CC BY-ND) Kun elektroniset kamerat ja anturit pienenevät, pystymme sisällyttämään ne uusiin tapoihin. Esimerkiksi, jos laitamme paineanturit ja kamerat robottiin käsissä, ne voivat antaa palautetta robotin ohjaimelle (onko ihminen vai automatisoitu), kun pito on turvallinen tai jos jokin alkaa liukastua. Eräänä päivänä he saattavat pystyä havaitsemaan, mihin suuntaan liukuva esine liikkuu, joten robotti voi tarttua siihen.
Nämä kyvyt ovat jo luonteeltaan ihmisille näkö ja proprioceptio (kyky tuntea ruumiinosien suhteelliset asennot etsimättä tai ajattelematta sitä). Kun pystymme saavuttamaan ne robotissa, he voivat tehdä esimerkiksi havaita, onko ote liian voimakas ja puristaako esine liian voimakkaasti.
Koordinoitujen liikkeiden suunnittelu
Toinen virstanpylväs on menetelmien kehittäminen robotille selvittääkseen, mitkä liikkeet heidän on tehtävä reaaliajassa, mukaan lukien niiden käsien havaitseminen, jotka heidän käsillään tapahtuvat joka hetki. Jos robotti käsi havaitsee muutokset käsittelemissä kohteissa tai manipuloi esineitä pitäen niitä kiinni, he voivat auttaa sellaisissa yleisissä manuaalitehtävissä, kuten solmujen sitominen ja vaijerin poisto.
Kahden käden yhdessä työskenteleminen on vielä kauempana tulevaisuuteen, vaikka se antaisi merkittävän vauhdin etenkin valmistukseen. Robotti, joka voi käyttää poraa kahdella kädellä tai siirtää koneen osia kädestä toiseen, olisi suuri parannus, jonka avulla tehtaat voisivat automatisoida prosessiensa vielä enemmän vaiheita.
 Onko tämä tulevaisuuden robotti? (NASA)
Onko tämä tulevaisuuden robotti? (NASA) Me ihmiset, emme ole vielä kehittäneet näitä järjestelmiä. Ihmismaisen itsenäisen robottiosaamisen saavuttaminen pitää robotiikan tutkijoita, tekniikoita ja innovaatioita kiireisenä lähitulevaisuudessa. Se ei hidasta käynnissä olevaa robottivallankumousta valmistuksessa, koska nykyisissä prosesseissa on vielä paljon tilaa automaatiolle turvallisuuden, nopeuden ja laadun parantamiseksi. Mutta kun teemme robotteja entistä paremmiksi, he voivat antaa meille käden.
Tämä artikkeli on alun perin julkaistu keskustelussa.
Taskin Padir, sähkö- ja tietotekniikan apulaisprofessori, Koillis-yliopisto